Publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2025
-
 Unfolding the Literature: A Review of Robotic Cloth ManipulationAnnual Review of Control, Robotics, and Autonomous Systems, 2025
Unfolding the Literature: A Review of Robotic Cloth ManipulationAnnual Review of Control, Robotics, and Autonomous Systems, 2025 -
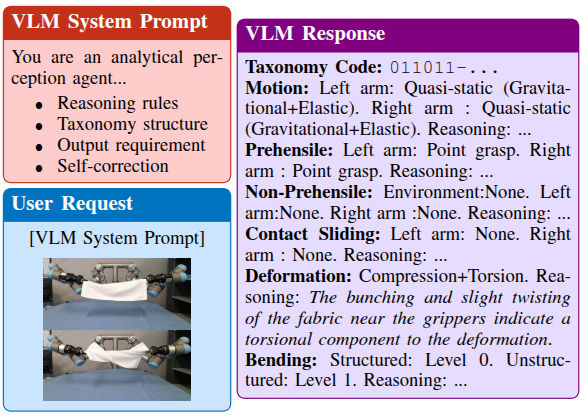 Scene Understanding in Deformable Object Manipulation via Taxonomy-Guided Vision-Language ModelsIn 5th Workshop on RObotic MAnipulation of Deformable Objects at 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
Scene Understanding in Deformable Object Manipulation via Taxonomy-Guided Vision-Language ModelsIn 5th Workshop on RObotic MAnipulation of Deformable Objects at 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 -
 Efficient End-effector Co-Design by Demonstration for Deformable Fragile Object ManipulationIn 1st Workshop on Robot Hardware-Aware Intelligence at Robotics: Science and Systems (RSS), 2025
Efficient End-effector Co-Design by Demonstration for Deformable Fragile Object ManipulationIn 1st Workshop on Robot Hardware-Aware Intelligence at Robotics: Science and Systems (RSS), 2025 - Dynamic flex compensation, coordinated hoist control, and anti-sway control for load handling machines2025US Patent App. 17/849,145
2024
-
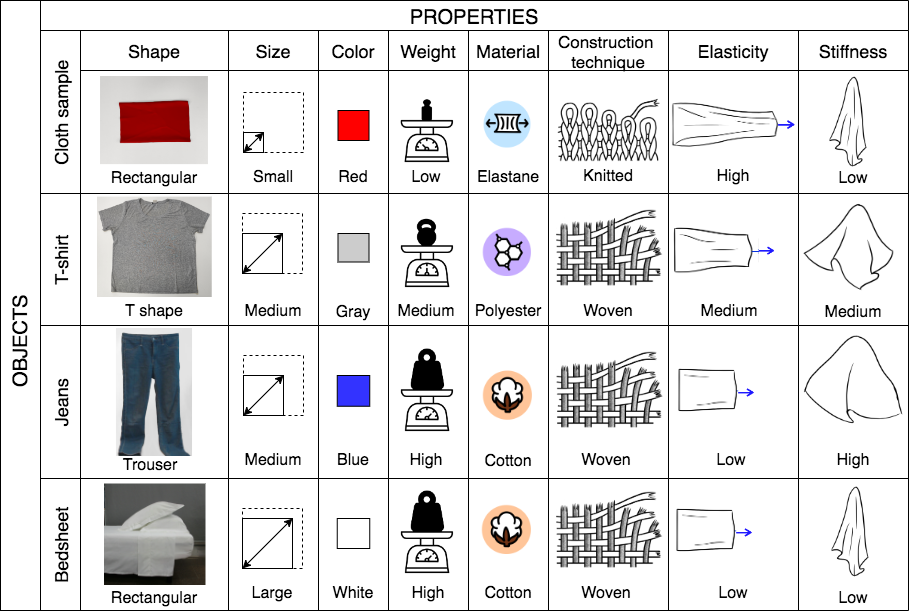
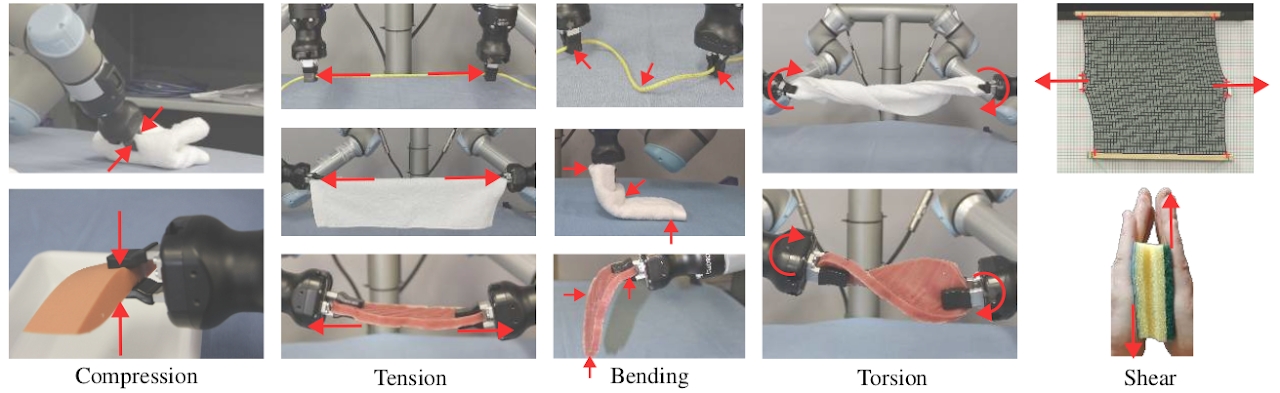 T-DOM: A Taxonomy for Robotic Manipulation of Deformable ObjectsarXiv preprint arXiv:2412.20998, 2024
T-DOM: A Taxonomy for Robotic Manipulation of Deformable ObjectsarXiv preprint arXiv:2412.20998, 2024 -
 Rapid Improvement of Fiber Tensile Properties via In Situ Biomimetic Robotic Pulling and Bayesian OptimizationAdvanced Intelligent Systems, 2024
Rapid Improvement of Fiber Tensile Properties via In Situ Biomimetic Robotic Pulling and Bayesian OptimizationAdvanced Intelligent Systems, 2024
2023
- QDP: Learning to Sequentially Optimise Quasi-Static and Dynamic Manipulation Primitives for Robotic Cloth ManipulationIn 3rd Workshop on Representing and Manipulating Deformable Objects at IEEE International Conference on Robotics and Automation ICRA, Jun 2023
2022
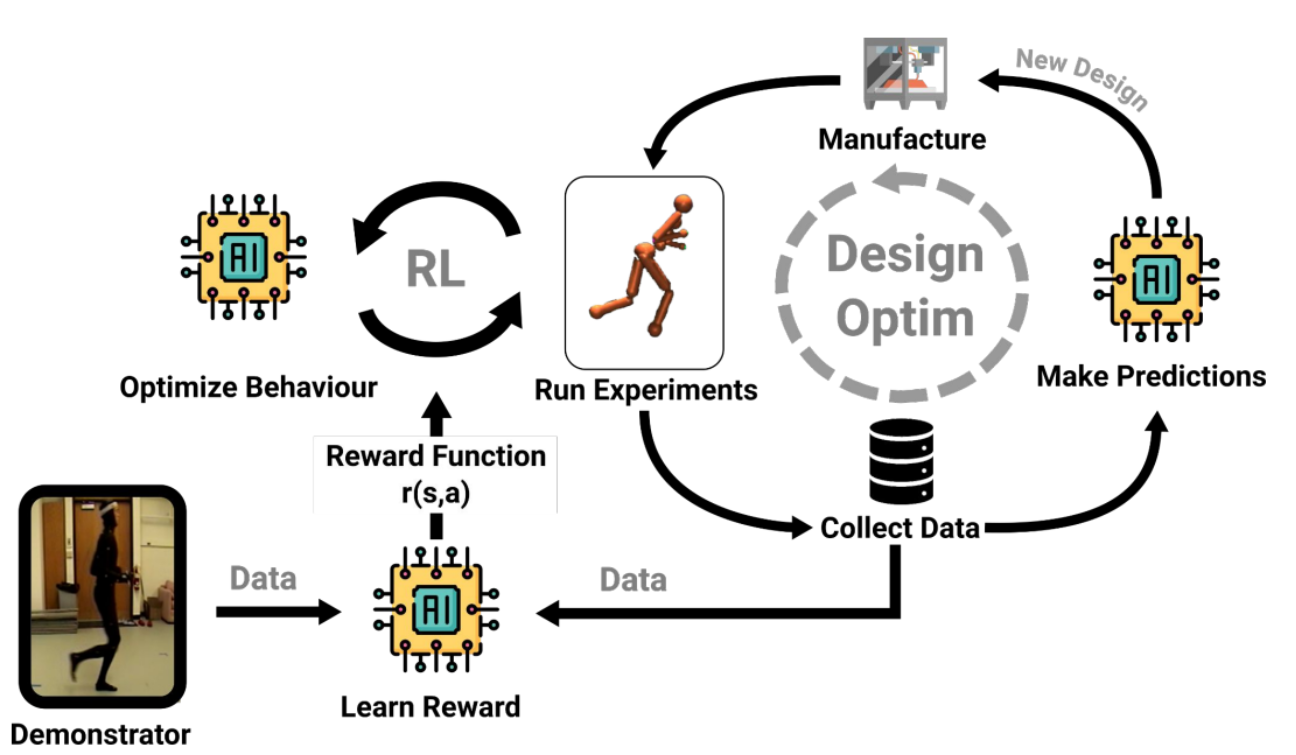
- Co-Imitation: Learning Design and Behaviour by ImitationIn Deep Reinforcement Learning Workshop at NeurIPS 2022, Jun 2022
- Prevention of swinging in cargo handling equipmentJun 2022FI Patent App. FI20225356A
2021
-
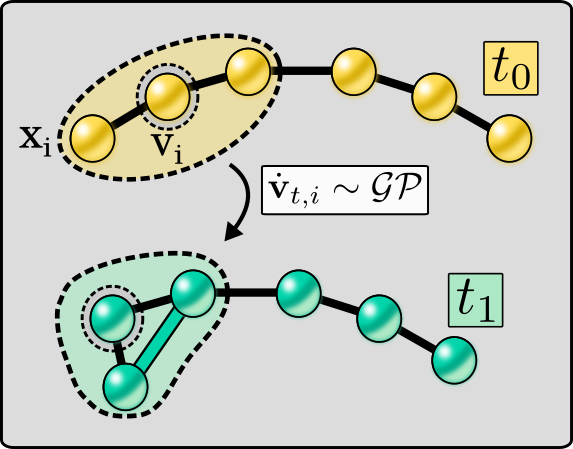 Evolving-Graph Gaussian ProcessesIn Time Series Workshop at 34th International Conference on Machine Learning., Jun 2021
Evolving-Graph Gaussian ProcessesIn Time Series Workshop at 34th International Conference on Machine Learning., Jun 2021
2017
- A Real-Time Reconfigurable Collision Avoidance System for Robot ManipulationIn Proceedings of the 3rd International Conference on Mechatronics and Robotics Engineering, Paris, France, Jun 2017
2016
- Cascade Control of the PUMA 560 Motors using Simuurl and ArduinoIn Robocity16 Open Conference on Future Trends in Robotics, Jun 2016